
DeepMind 是 Alphabet 的子公司和 AI 研究实验室,在 2021 年 10 月,它收购了用于机器人研发的 MuJoCo 物理引擎,并承诺该模拟器将作为免费、开源、社区驱动的项目进行维护。现在,DeepMind 声称开源计划已完成,它的整个代码库 可在 GitHub 上获得。
MuJoCo 是 “Multi-Joint Dynamics with Contact” 的缩写,它是一个物理引擎,旨在帮助机器人、生物力学、图形和动画等领域的研究和开发(也包括其他需要快速准确模拟的领域)。MuJoCo 可用于帮助机器学习应用实现基于模型的计算,例如 控制综合 、 状态估计 、 系统识别 、 机制设计 、通过 逆动力学 来进行数据分析,以及 并行采样 。它也可以用作标准模拟器,例如用于游戏和交互式虚拟环境。(LCTT 译注:这段话中涉及到不少专业词汇,鉴于译者水平有限,若有谬误,请在评论中指出,同时也欢迎在评论中科普,一起学习~)
根据 DeepMind 的说法,以下是 MuJoCo 适合协作的一些功能:
- 能够模拟复杂机制的综合模拟器
- 可读、高性能、可移植的代码
- 易于扩展的代码库
- 丰富的文档,包括面向用户的和代码注释 —— 我们希望学术界和 OSS 社区的同事能够使用这个平台并为代码库做出贡献,从而改善所有人的研究
DeepMind 还说:
“作为没有动态内存分配的 C 库,MuJoCo 非常快。不幸的是,原始物理速度一直受到 Python 包装器的阻碍:全局解释器锁(GIL)和非编译代码的存在,使得批处理、多线程操作无法执行。在下面的路线图中,我们将解决这个问题。”
(LCTT 译注: 这里补充了原文没有提及的路线图和基准测试结果。)
路线图:
- 通过批处理、多线程模拟释放 MuJoCo 的速度潜力
- 通过改进内部内存管理支持更大的场景
- 新的增量编译器,带来更好的模型可组合性
- 通过 Unity 集成支持更好的渲染
- 对物理导数的原生支持,包括解析和有限差分
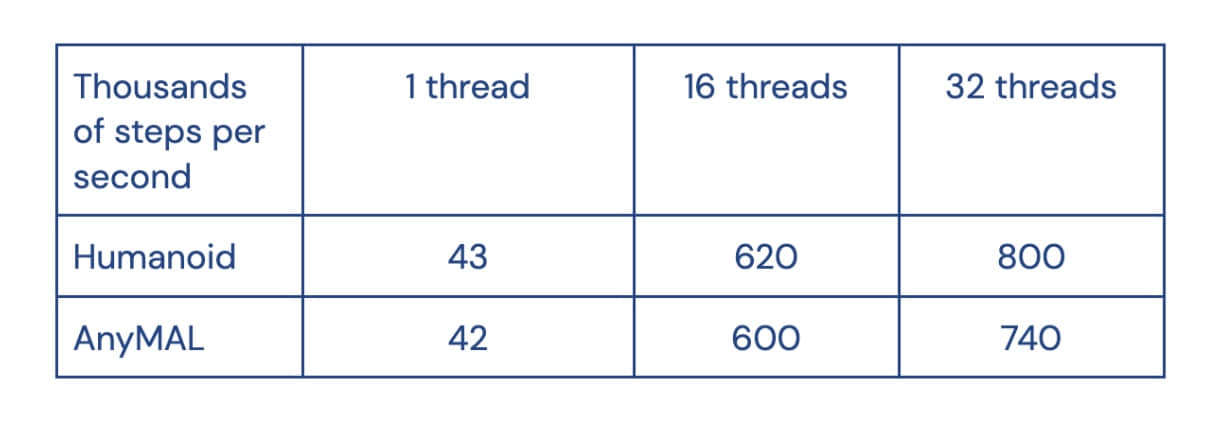
“目前,我们想分享两个常见模型的基准测试结果。注意,这个结果是在运行 Windows 10 的标准 AMD Ryzen 9 5950X 机器上获得的。”
via: https://www.opensourceforu.com/2022/05/deepminds-open-source-mujoco-is-available-on-github/
作者:Laveesh Kocher 选题:lkxed 译者:lkxed 校对:wxy
主题测试文章,只做测试使用。发布者:eason,转转请注明出处:https://aicodev.cn/2022/05/30/deepmind-%e7%9a%84%e5%bc%80%e6%ba%90%e7%89%a9%e7%90%86%e5%bc%95%e6%93%8e-mujoco-%e5%b7%b2%e5%9c%a8-github-%e5%8f%91%e5%b8%83/